Raspberry Flavored Time (A NTP server on your Pi, tethered to a GPS unit)
2014/11/12: This article’s is in the process of being revisited. Please keep in mind that it is very old before using its instructions and resources.
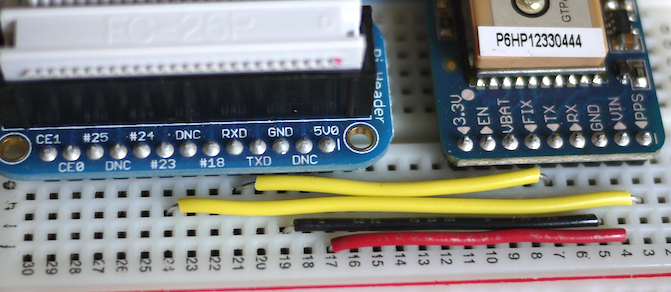
GPS module connected to a Raspberry Pi (for accurate time keeping):